Today was … productive.
Since we got our strategy and design ratified by the team, we did some work on our chassis.
As you can see, our chassis is pretty small. Final size is 24″W, 22″L, and in the range of 12″H (we still have a bit more CAD to do). Here’s what we’ve completed so far: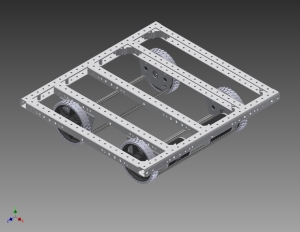
And in real life:
Yup. We’re doing 2WD. Since our robot figures to be pretty light (<70 lbs) and our strategy doesn’t involve very much driving around, we decided to save weight and space and direct-drive some CIMple boxes.
We’re going to do a two-tiered electronics panel, with the battery and pneumatic tanks on the lower level; cRIO, PDB, router, jaguars, and victors on top. We haven’t used pneumatics since 2010, so we’ve got a lot to (re)learn.
Maybe tomorrow and/or Saturday we’ll get more CAD done. We still need to figure out the geometry of the arms and how exactly they’ll interface with the chassis.

Just a quick comment about direct-driving CIMple box, you may find it’s geared way too high (there’s only a one-stage reduction). You may find the robot performs better with a chain reduction on the output, or use a two-stage reduction gearbox like the Toughbox Nano. Certainly using a sprocket in the design lets you change it afterwards if needed.
Good luck with the climbing, and the new rule change…
J.Charlton
Team 296, Northern Knights